NXTMover
Having the library NXTRemoteControl, we can now build another library using that.
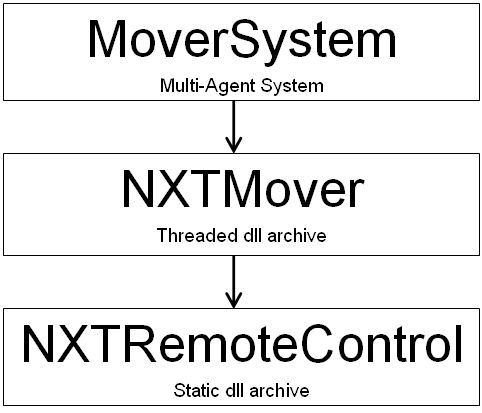
The idea behind seperating these two levels, is that you can make countless configurations of a NXT. The NXTRemoteControl should be, and is, able to control each one of them. All you need, is to develop a library on top of it.
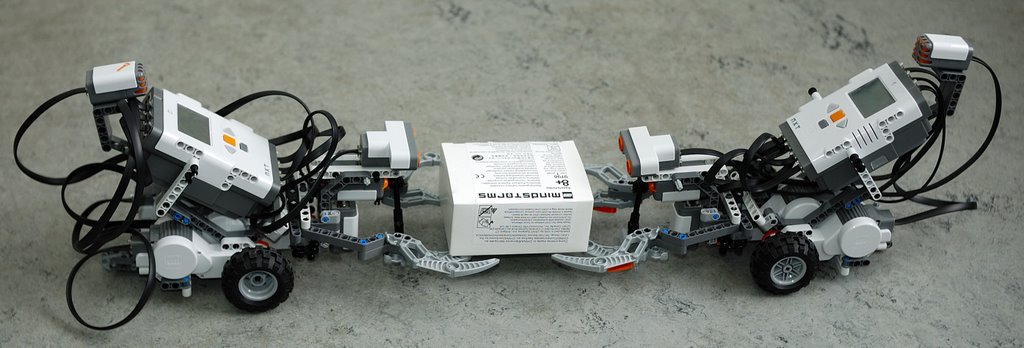
Our robot needs to be able to drive around and lift/move objects. Hence the name NXTMover. The library (NXTMover) will be action based, with each action running in a seperate thread. You will then be able to tell the NXTMover, to "move the robot along a line", "pick up object" or "go to this place".
Above this, we will implement some intelligence and multi agent abilities such that several NXTMovers can coorporate about moving object. More about this later. The figure below illustrates these concepts.